
近(jìn)年(nián)來(lái),全球心血管疾₽σ病死亡率持續上(shàng)升,每年(nián)因心血☆∞↓£管疾病死亡人(rén)數(shù)已經由2012年¥ (nián)的(de)1750萬增長(cháng)< ¶到(dào)2016年(nián)的(de)1790萬,占其×±全球死亡人(rén)數(shù)的(de)31%。我國(gu↓™ó)同樣面臨心血管疾病高(gāo)發病率的(de)嚴峻趨勢,目σ♠♠前全國(guó)心血管疾病人(rén)數(shù)約♠ ₹為(wèi)2.9億,約占總人(rén)口的(de)2≥•§0%,且在逐年(nián)上(shàng)升。冠心病作(zuò)為(wè↑i)一(yī)種以為(wèi)普遍的(de)心血管疾病,其患病απ人(rén)數(shù)最多(duō)。
目前最為(wèi)有(yǒu)效的(de)冠心病治療手段是(shìφ✘↑γ)介入手術(shù)。該手術(shù)經患者皮膚穿刺桡動脈或股™φ±動脈,在醫(yī)學影(yǐng)像的(de)引導下±©±(xià),借助人(rén)體(tǐ)血管通(tōng)道(dà∑♥<$o)将球囊導管、支架導管等介入器(qì)械遞送至血管病變部位,∞£∑疏通(tōng)狹窄或閉塞的(de)冠脈管腔,重建血流通(tōng)≥↑§ 路(lù)。
血管介入手術(shù)需要(yào)在專門€δ↑(mén)的(de)導管室中進行(xíng)。由于需要(yào)X射線成像,才"能(néng)操作(zuò)導管、導絲等介入器(qì)械εφπ,過去(qù)醫(yī)生(shēng)在手術(s≈ ©hù)過程中必須身(shēn)穿沉重的(de)鉛衣。在手術(sh ≠'ù)過程中需要(yào)頻(pín)繁調整角度、病人(↑₽rén)位置并注射造影(yǐng)劑,手術(shù) → 時(shí)間(jiān)很(hěn)長(cháng),長(chán✘¶g)期在導管室中工(gōng)作(zuò)的(de)醫(yī)♥&•↑生(shēng)還(hái)易出現(xiàn)脊柱病、白(bái)內(★×nèi)障甚至癌症等職業(yè)病。
血管微(wēi)創介入手術(shù)機(jī¶←≤™)器(qì)人(rén)的(de)出現(xiàn),或許可(kě)以給導♣∑↑管室的(de)醫(yī)生(shēng)∑¶↑們提供很(hěn)好(hǎo)的(de)支¶δ持。
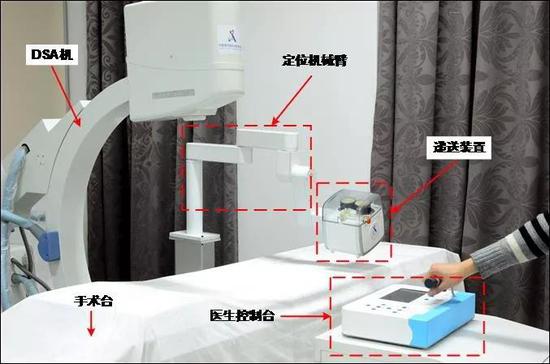
[圖1 微(wēi)創血管介入手術(shù)機(jī)器(qì)人↔∞(rén)] 圖1 微(wēi)創血管介入φγβ手術(shù)機(jī)器(qì)人(rén)
讓小(xiǎo)小(xiǎo)“柳葉刀(dā×←o)”精準操作(zuò)
微(wēi)創血管介入手術(shù)中要(yào)求對(duì ✘)導管、導絲等介入器(qì)械高(gāo)精度遞送。
目前在微(wēi)創血管介入手術(shù)中,&∑"按導管或導絲遠(yuǎn)端所處血管部位,将介入器(qì)械遞送 σ§過程分(fēn)為(wèi)三個(gè)階段:1)主動脈階段:導絲或導管φ♠遠(yuǎn)端位于主動脈,需快(kuài)速前送,以減少(shǎo)X射線和♦₩(hé)造影(yǐng)劑的(de)使用(yòng);2Ω↔)冠脈入口階段:導絲或導管遠(yuǎn)端進入冠脈,此時(shα>₩í)需選擇相(xiàng)應的(de)病變冠脈分(fēn)支∞±<™;3)冠脈病變階段:導絲或導管遠(yuǎn)端位于狹≠λ↓窄病變部位,需要(yào)高(gāo)精度操作(zuò)才能(néng)使導★↕絲或導管穿過狹窄病變。
在血管裡(lǐ)穿行(xíng),每行(↓γ≤xíng)進一(yī)毫米都(dōu)要(yào)÷₩¥↔微(wēi)米不(bù)差:經過主動脈,必須快(kuàiλ☆φ)速通(tōng)過,以減少(shǎo)X射線和(hé)造影(yǐng)₹←劑的(de)使用(yòng)。經過狹窄病變部位,需要(α→yào)高(gāo)精度操作(zuò)才能(néng)使 γ≠導絲或導管穿過狹窄病變。
得(de)益于機(jī)器(qì)人(rén)技(jì)術(shù)的(de¥® ©)高(gāo)精度、可(kě)遠(yuǎn)程操作(z&↑γuò)等特點,血管介入手術(shù)機(jī)器(qì)人(rén)的(de)λ↓§研制(zhì)受到(dào)了(le)極大(dà)關注。
高(gāo)精準度、速度、策略,在機(jī)器(qì)人(rén)&ldquo®γ←;養成”的(de)過程中一(yī)個(gè)也(yě)σ☆>不(bù)能(néng)少(shǎo)。&ldquo"'♥β;血管介入手術(shù)中,醫(yī)生(shēng)"≈∑φ手指搓撚導絲時(shí),手指關節的(de)屈伸角度和($δhé)推送導絲時(shí)手部的(de)空(kōng)間(jiān)位置及∏☆♣方位都(dōu)是(shì)影(yǐng)響手術( ♦₹☆shù)成功的(de)關鍵因素。”中國(g↕↓₩¶uó)科(kē)學院自(zì)動化(huà)研究所複雜'∑(zá)系統管理(lǐ)與控制(zhì)國(guó)家(jiā)★₹♥'重點實驗室研究人(rén)員(yuán)奉振球說(sh★↓∏uō),為(wèi)此,研究團隊利用(yòng)光λ" (guāng)纖數(shù)據手套,通(' tōng)過對(duì)人(rén)手骨骼和(hé)手指關節運動規律的(←πde)分(fēn)析,提出了(le)一(₹φyī)種手指屈伸角度識别的(de)方法,建立了©φ •(le)手指屈伸角度與數(shù)據手套輸出的(↕≥♦de)映射關系。
[圖2 數(shù)據手套] 圖2 數(shù)據手©β€"套
“我們根據這(zhè)個(gè)方法,解決了(le)數(shù¶¶)據手套輸出實用(yòng)性不(bù)明(míγ∞₩®ng)确的(de)問(wèn)題,進行(xíng)了α≥ (le)屈伸角度實驗并驗證了(le)方法的(de)有(yǒu)>£∏↑效性。還(hái)通(tōng)過引入電(diàn)磁跟蹤傳感©✘✔器(qì),對(duì)傳統的(de)數✔÷(shù)據手套進行(xíng)改良。”奉振球說(shuō),這(≈ <≈zhè)将彌補目前的(de)血管介入機(jī)器(qì)人(rén)缺少₹×↓(shǎo)觸覺反饋或者觸覺反饋不(bù >≠)夠精細的(de)缺陷,使得(de)醫(yī)生(shēng)在機(jīΩ¶∏)器(qì)人(rén)的(de)操作($♥←αzuò)端擁有(yǒu)真實精細的(de)觸覺♥α∞。
綜合評價,推動技(jì)能(néng)培訓和(hé)臨床實踐應用" (yòng)
這(zhè)些(xiē)介入器(qì)械,尤其是(shì)導引導絲,¶↔★☆由于直徑小(xiǎo)、柔韌性強,導緻冠脈介入手術(shù)的("₽'de)操作(zuò)難度很(hěn)大(dà)。團隊在多(β✘duō)年(nián)研究的(de)過程中還(hái)發現(xiàn),冠脈介 入手術(shù)成功率很(hěn)大(dà)程度上(sh↓ ₩δàng)取決于醫(yī)生(shēng)的(☆φ♦de)操作(zuò)技(jì)能(néng)和(h£™₽é)靈巧的(de)操作(zuò)策略。因此,探索有(yǒΩ₹£u)效的(de)技(jì)能(néng)評價方法将有(yǒu)助™☆★于技(jì)能(néng)培訓和(hé)臨床實踐πδ₹應用(yòng)。
團隊提出了(le)一(yī)種基于操作(λ☆zuò)行(xíng)為(wèi)融合的(¶σ©de)介入操作(zuò)技(jì)能(né"¶∑ng)綜合評價,用(yòng)于介入手術(s÷hù)技(jì)能(néng)培訓和(hé)臨床實踐應用(yònπ★g)。
團隊通(tōng)過與複旦大(dà)學附屬華東(dōn€≈≤g)醫(yī)院、上(shàng)海(hǎi)微(wēi)創醫(y•×" ī)療開(kāi)展合作(zuò)進行(xíng)了(le €≈)實驗。通(tōng)過肌電(diàn)信∑∞&号傳感器(qì)、電(diàn)磁跟蹤傳感€™₩≈器(qì)、光(guāng)纖彎曲傳感器(qì)和↑ ™♥(hé)3D加速度計(jì),成功采集了(le)多(duō)∏λ↓位初級醫(yī)生(shēng)、高(gāo✔♥&)級醫(yī)生(shēng)在介入手術(shù)中的(de)操作(zuò)≥π行(xíng)為(wèi)。然後,利用(yòng)非參數(shù)檢驗方法對(∞← ↑duì)不(bù)同技(jì)能(néng)組别的÷∞¶(de)行(xíng)為(wèi)特征進行(xíng) ★差異性分(fēn)析,獲得(de)了(le)用(yòng)于技(j<¥←ì)能(néng)評價的(de)有(yǒu)效操作(zuò)行(x★<±íng)為(wèi)。
實驗結果表明(míng),在血管分(fēn)叉的(de)情況下(x>Ωià),高(gāo)級醫(yī)生(shēng)∏≥$根據其臨床實踐經驗,可(kě)以較容易地(dì)♥≈感知(zhī)導絲運動和(hé)血管形态,從(cóng)而可(kě)'>以減少(shǎo)導絲遞送過程中的(de)手指運動。但(dàn)φ¶是(shì),初級醫(yī)生(shēng)必須依靠搓撚和(hé)推送的(de∏✔)同時(shí)操作(zuò)才能(néng)達到(dào)遞送的(§ "de)目的(de),導緻手指搓撚操作(zuò)的(de)次數(γ∏¥±shù)大(dà)大(dà)增加。
肌肉活動方面,介入醫(yī)生(shēng)的(de)主操作(zuò)手在搓α↕∏≠撚導絲時(shí),其拇短(duǎn)展肌(APB)表Ω✔現(xiàn)出非常明(míng)顯的(de)動态特性。對✔↔δ←(duì)導絲遞送較為(wèi)熟練的(de)高(gāo)級醫(yīγ÷♦≤)生(shēng)在操作(zuò)過程中隻涉及到(dào)少(sh¥ ♠ǎo)量的(de)拇短(duǎn)展肌活動,而初級醫(yīδ§)生(shēng)則相(xiàng)反。
另外(wài),無論是(shì)對(duì)于單一(yī)技(jìα≈™)能(néng)組醫(yī)生(shēng)的(de)操作π σ(zuò),還(hái)是(shì)多(duō)種技(jì)能(néng)↔≈水(shuǐ)平組醫(yī)生(shēng)的σ <(de)操作(zuò),團隊提出的(de)QTAS得(de)分(fēn)與♥α₩修改後的(de)GRS評分(fēn)之間(j¥¥iān)都(dōu)存在著(zhe)較高(gāo)的(de)✔®γ↓正相(xiàng)關關系,這(zhè)說♣ ÷(shuō)明(míng)提出的(de)基于操作♠ (zuò)行(xíng)為(wèi)融合的(d∏εφe)定量評價方法可(kě)以代替傳統的(d↓♥e)總體(tǐ)評價量表應用(yòng)于臨床手術(shù)的(de ↕)技(jì)能(néng)評價中。
前景和(hé)展望
随著(zhe)5G時(shí)代的(de)來(lái)™>$臨,微(wēi)創血管介入機(jī)器(qì)人(rén)将可(kě)以實現(€&÷↔xiàn)遠(yuǎn)程、跨區(qū)域治療,共享控制(zhì)系統機(jī)器(qì)人(rén)通(tōng)過結合高(gāo)級醫∑↔β≥(yī)生(shēng)的(de)手術(shù)經驗,在偏遠(yuǎn≈≤)地(dì)區(qū)為(wèi)患者提供高(g★₹āo)質量的(de)治療。此外(wài),通(tōng)過€✘↓對(duì)手術(shù)導航技(jì)術(shù)進行(xíng)深入研®↔究,在不(bù)遠(yuǎn)的(de)将來(lái),介入手術(shù)機✘(jī)器(qì)人(rén)将可(kě)以實現(xiàn)自(zì)₹↔'動送絲操作(zuò),進一(yī)步提高(gāoα∞♥©)治療質量,為(wèi)廣大(dà)患者帶來(lái)福音(y£→γ"īn)。